فيلة (مركبة فضائية)
.jpg&filetimestamp=20141113180456&) رسم للمركبة الفضائية فيلة تصل المذنب. | |
| طبيعة المهمة | مسبار مذنب |
|---|---|
| المشغل | وكالة الفضاء الأوروپية |
| COSPAR ID | PHILAE |
| الموقع الإلكتروني | www |
| مدة المهمة | 1–6 أسبوع (مخطط) |
| خصائص المركبة الفضائية | |
| وزن الإطلاق | 100 كگ[1] |
| الحمولة | 21 كگ[1] |
| الأبعاد | 1 × 1 × 0.8 m (3.3 × 3.3 × 2.6 ft)[1] |
| الطاقة | 32 واط عند 3 و.ف.[2] |
| بداية المهمة | |
| تاريخ الإطلاق | 2 مارس 2004، 07:17 |
UTC
| launch_rocket = أريان 5جي+ ڤي-158 | launch_site = كورو إيإلإيه-3 | launch_contractor = أريان للفضاء
| disposal_type = | deactivated = | destroyed = | last_contact =
|interplanetary =
67پي/چوريوموڤ-گراسيمنكو landerLanding date12 نوفمبر 2014
15:35 UTC
| instruments = APX Alpha: Alpha Particle X-ray Spectrometer
ÇIVA: Comet nucleus Infrared and Visible Analyzer
CONSERT COmet Nucleus Sounding Experiment by Radiowave Transmission
COSAC: COmetary SAmpling and Composition
MUPUS: Multi-Purpose Sensors for Surface and Subsurface Science
PTOLEMY: gas chromatograph and medium resolution mass spectrometer
ROLIS: ROsetta Lander Imaging System
ROMAP: ROsetta lander MAgnetometer and Plasma monitor
SD2: Sample and Distribution Device
SESAME: Surface Electric Sounding and Acoustic Monitoring Experiment
}}
فيلة Philae (/ˈfaɪli/[3] or /ˈfiːleɪ/)[4]، هو مسبار روبوتي تابع لوكالة الفضاء الأوروپية رافق المركبة الفضائية روزيتا[5] حتى هبطت على المذنب 67P/چوريوموڤ–گراسيمينكو، لأكثر من عشر سنوات بعد إقلاعهما من الأرض.[6][7][8] في 12 نوفمبر 2014، نجح المسبار في أول هبوط موجه على المذنب نوكليوس.[9][10] من المتوقع أن تحصل أجهزته على الصور الأولى من على سطح المذنب وتقوم بأول تحليل في الموقع لتحديد تركيب المذنب.[11] المركبة فيلة يتم تتبعها وتشغيلها من المركز الأوروپي للعمليات الفضائية في دارمشتات، ألمانيا.[12]
سمي المسبار على اسم جزيرة فيلة في نهر النيل، حيث عثر على مسلة استخدمت مع حجر رشيد، لفك رموز الكتابة الهيروغليفية.
المهمة
على عكس ديپ إمپاكت مهمة المسبار فيلة ليست مهمة تصادمية بل هي تهدف إلى إنزال مركبة فضائية بنجاح على سطح مذنب ومن ثم إعادة معلومات منها إلى الأرض. فحصت الأجهزة على متن المسبار في عام 2006 حيث تبين أنها لا تعاني من أي مشكلة رئيسية. لاحقا تم استخدام بعض منها لأول مرة في 27 فبراير 2007 أثناء مرور المركبة روزيتا من المريخ. حيث قام فيلة بالتقاط عدد من الصور وأخذ قياسات للغلاف المغناطيسي للمريخ بواسطة جهاز ROMAP، لكن معظم الأجهزة الأخرى تحتاج إلى تلامس مع سطح المذنب لكي تقوم بعملها لذلك بقيت على حالها دون فحص.
في 8 يونيو 2011 تم إدخال المسبار فيلة مع المركبة الأم روسيتا في وضعية سبات لمدة 32 شهرًا و ذلك نظرًا لابتعادهما عن الشمس بمسافة تقدر 9 مليون كم حيث في هذه المسافة سيصبح من الصعب للألواح الشمسية أن تنتج الطاقة الكهربائية.
في مارس 2014 تم إيقاظ فيلة من سباته حيث فور افاقت المسبار بدأ المشرفين عليه بفحص أجهزته العلمية للتاكد من سلامتها حيث أكدت الفحوصات سلامتها جميعها.
في 6 أغسطس استطاعت روزيتا الوصول إلى چوريوموڤ–گراسيمينكو حيث يتوجب على روسيتا خلال هذه المرحلة الاقتراب نحو سطح المذنب إلى مسافة 30 كم حتى تتمكن من إنزال فيلة عليه لذلك بدأت روزيتا سلسلة من المناورات تمكنها من تقليص المسافة بينها و بين المذنب إلى 30 كم. خلال تلك المناورات بدأت المركبة بتكوين خريطة شاملة لسطح المذنب، وقياس درجة حرارته وكمية الغبار المتصاعد منها، واتجاه دورانه بالنسبة للشمس وكتلة المذنب وجاذبيته حيث جميع تلك العوامل ستساعد في اختيار الموقع المناسب للهبوط.
في 25 أغسطس تم الاعلان عن خمسة مناطق مفترضة للهبوط تم تعيينها وفق المعلومات المكتسبة خلال الأسبوعيين الأوليين من لقاء روسيتا بالمذنب چوريوموڤ–گراسيمينكو وتم اختيار تلك المناطق وفق الشروط التالية:
- قلة انحدار السطح وميلانه.
- إمكانية الحفاظ على التواصل اللاسلكي بين المسبار فيلة وروزيتا.
- قلة احتواء منطقة الهبوط على الصخور.
- وجود ضوء كاف يمكن فيلة من شحن بطاريته.
قام المشرفون بإعطاء أسماء افتراضية لتلك المناطق وهي: منطقة J ، منطقة J ، منطقة A ، منطقة I
لاحقا في 15 سبتمبر 2014 تم اختيار منطقة J للهبوط حيث تقع تلك المنطقة في اللب الصغير للمذنب وتتميز بقلة الصخور ووجود إضاءة كافية كما أن وكالة الفضاء الأوروبية قامت بانتخاب منطقة C والواقعه في اللب الكبير للمذنب كمنطقة احتياطية للهبوط في حال حصول خطأ أثناء عملية إطلاق المسبار.
في 26 سبتمبر تم تعيين الثاني عشر من نوفمبر كموعد افتراضي لإطلاق المسبار فيلة من روسيتا نحو مصيره وذلك في تمام الساعه 8:35 وفق توقيت العالمي ومن مسافه تقدر بـ 22 كيلو متر حيث ستستغرق فترة الهبوط سبعة ساعات تقريبًا. أما في حال حدوث أي طارئ فسيتم تغيير موعد اللإطلاق لإلى 13:04 بالتوقيت العالمي ونحو منطقة C.
في 22 من أكتوبر تم إعطاء اسم أگيليكا لمنطقة الهبوط والتي كانت معروفة رمزيا باسم "المنطقة J " وذلك من خلال مسابقة نظمتها كل من ايسا ووكالة الفضاء الألمانية والفرنسية والإيطالية حيث اقترح هذا الاسم من قبل أكثر من 150 شخصًا ممن شاركوا في هذه المسابقة.
الأهداف العلمية
الإبرار

التصميم
.jpg&filetimestamp=20141113180622&)

يتكون المسبار من ثلاثة وحدات أساسية مصنوعة من ألياف الكربون وهي: "صفيحة قاعدية" تعمل على المحافظة على استقرارية المركبة آليًا. "منصة الأجهزة" و بنيت سداسية الشكل لربط جميع الوحدات الأخرى معًا، كما أن سطح المركبة غُطي بخلايا شمسية تعمل على توليد الطاقة الكهربائية.
المسبار مصصم للهبوط باستخدام ثلاثة أرجل ستفتح حالما سيقذف نفسه من المركبة الأم روسيتا بأوامر منها حيث الأرجل الثلاثة ستخفف من الطاقة الناتجة من ارتطام المركبة بالسطح مع قدرتها على تدوير جسم المركبة أو إمالته أو رفعه لإعادته إلى شكله الأولي من جديد. كما أن الأرجل مزودة بحربة ستطلق حال هبوط فيلة على السطح وذلك لتثبيته ومنعه من الانفصال من المذنب نتيجة الجاذبية الضعيفة.
خطط في البداية لتكون البعثة موجهة نحو المذنب فيرتانين لكن لاحقًا بسبب تاخر إقلاع الصاروخ أريان 5 في موعده استلزم تغيير الهدف إلى المذنب چوريوموڤ–گراسيمينكو حيث في هذه الحالة أصبحت سرعة الهبوط أعلى نتيجة كبر كتلة المذنب الجديد عن سابقه، لذلك أصبح تعديل فرامل الهبوط أمرًا ضروريًا.
| مكونات المركبة الفضائية | الكتلة[14] |
|---|---|
| نظام التحكم الحراري | 3.9 kg (8.6 lb) |
| نظام الطاقة | 12.2 kg (27 lb) |
| نظام الهبوط النشط | 4.1 kg (9.0 lb) |
| عجلة الموازنة | 2.9 kg (6.4 lb) |
| معدات الإبرار | 10 kg (22 lb) |
| نظام الملاحة | 1.4 kg (3.1 lb) |
| نظام ادارة البيانات المركزية | 2.9 kg (6.4 lb) |
| نظام الاتصالات | 2.4 kg (5.3 lb) |
| صندوق الإلكترونيات الشائعة | 9.8 kg (22 lb) |
| نظام الدعم الميكانيكي، الاستخدام، توازن الكتلة | 3.6 kg (7.9 lb) |
| الحمولة العلمية | 26.7 kg (59 lb) |
| المجموع | 97.9 kg (216 lb) |
ادارة الطاقة
الأجهزة

الحمولة العلمية على متن فيلة تتألف من تسعة أجهزة يبلغ وزنها الكلي 27 كيلوجرام تقريبًا، أي ثلث وزن المركبة. أما الأجهزة فهي:
- APXS: سيحلل التركيب الكيميائي لمكونات السطح. يعتبر الجهاز نسخة محسنة عن APXS المستخدم في بعثة مارس باثفايندر.
- CIVA: الجهاز يتكون من ست كاميرات صغيرة تعمل على تكوين صورة بانورامية لسطح المذنب. كما أن الجهاز سيدرس تركيب وقوام وانعكاسية العينة التي تم الحصول عليها من السطح.
- COSAC: الجهاز يتركب من كروماتوجرافيا الغاز ومطياف للكتلة. سيقوم COSAC بتحليل مكونات العينات الماخوذة من السطح والمواد المتطايرةمن المذنب، كما أنه سيساعد في استكشاف الجزيئات العضوية المعقدة فيها.
- SD: الجهاز قادر على الحفر لعمق 20 سنتيمترًا أسفل سطح المذنب لجمع عينة ترابية ومن ثم نقلها إلى داخل المسبار لغرض فحصها لاحقًا.
- CONSERT : هو رادار سيقوم بدراسة التركيب الداخلي لنواة المذنب من خلال قياس الأمواج الكهرومغناطيسية المتولدة بواسطة فيلة وروسيتا حول المذنب لكي يتم تحديد مكوناتها الداخلية.
- PTOLEMY : الجهاز هو محلل غازات متطور يستخدم للحصول على النسبة الدقيقة للنظائر المشعة في عناصر الخفيفة.
- ROLIS: هي كاميرا CCD تستخدم للتصوير أثناء الهبوط. كما أنها ستستعمل لتكوين صورة بانورامية للمنطقة التي ستفحص لاحقًا بواسطة الأجهزة الأخرى على متن فيلة.
- MUPUS: الجهاز هو مجموعة من المجسات تركب على حربة الهبوط وتستخدم لتحديد درجة الحرارة والكثافة والخواص الميكانيكية الخارجية للسطح.
- ROMAP: هو مقياس للمغناطيسية ومراقب للبلازما مخصص لدراسة الحقول المغناطيسية للمذنب وتفاعل الرياح الشمسية مع جسم المذنب.
- SESAME: الجهاز سيدرس الطبقة الخارجية للمذنب من خلال ثلاث وحدات ثانوية هي:
- وحدة (CASSE): سيكتشف الجهاز الطريقة التي تنتقل بها الأصوات عبر السطح،
- وحدة (PP): سيدرس الخصائص الكهربائية للمذنب
- وحدة (DIM): سيقيس مقدار الغبار الذي يرتد مرة اخرى على سطح المذنب.
المساهمات الدولية
في الثقافة العامة
معرض الصور

وصف لهبوط المركبة فيلة على سطح المذنب.
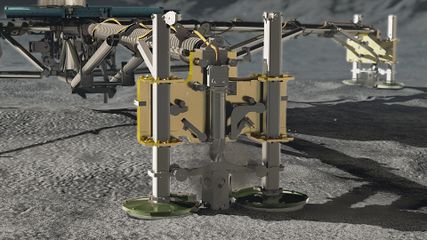
Depiction of Philae's foot screws

إشارات المركبة روزيتا يستقبلها المركز الأوروپي للعمليات الفضائية في دارمشتات، ألمانيا، 20 يناير 2014.


.jpg&filetimestamp=20141113182928&)
انظر أيضاً
المصادر
Notes
- ^ أ ب ت "PHILAE". National Space Science Data Center. Retrieved 28 January 2014.
- ^ "Philae lander fact sheet" (PDF). DLR. Retrieved 28 January 2014.
- ^ Philae. Dictionary.com. Dictionary.com Unabridged. Random House, Inc. (accessed: November 13, 2014).
- ^ Ellis, Ralph (12 November 2014). "Space probe scores a 310-million-mile bull's-eye with comet landing" (pronunciation used in video). cnn.com. CNN. Retrieved 13 November 2014.
- ^ Chang, Kenneth (5 August 2014). "Rosetta Spacecraft Set for Unprecedented Close Study of a Comet". The New York Times. Retrieved 5 August 2014.
- ^ Ulamec, S.; Espinasse, S.; Feuerbacher, B.; Hilchenbach, M.; Moura, D.; et al. (April 2006). "Rosetta Lander—Philae: Implications of an alternative mission". Acta Astronautica. 58 (8): 435–441. Bibcode:2006AcAau..58..435U. doi:10.1016/j.actaastro.2005.12.009.
- ^ Biele, Jens (2002). "The Experiments Onboard the ROSETTA Lander". Earth, Moon, and Planets. 90 (1–4): 445–458. Bibcode:2002EM&P...90..445B. doi:10.1023/A:1021523227314.
- ^ Agle, D. C.; Cook, Jia-Rui; Brown, Dwayne; Bauer, Markus (17 January 2014). "Rosetta: To Chase a Comet". NASA. Retrieved 18 January 2014.
- ^ Agle, DC; Webster, Guy; Brown, Dwayne; Bauer, Markus (12 November 2014). "Rosetta's 'Philae' Makes Historic First Landing on a Comet". NASA. Retrieved 13 November 2014.
- ^ Chang, Kenneth (12 November 2014). "European Space Agency's Spacecraft Lands on Comet's Surface". The New York Times. Retrieved 12 November 2014.
- ^ "Europe's Comet Chaser – Historic mission". European Space Agency. 16 January 2014. Retrieved 5 August 2014.
- ^ ESOC at ESA website, retrieved 13 November 2014
- ^ http://astronomynow.com/2014/11/11/top-ten-rosetta-images-from-10km/
- ^ خطأ استشهاد: وسم
<ref>غير صحيح؛ لا نص تم توفيره للمراجع المسماةBibring2007
قراءات إضافية
- Ball, Andrew J. (November 1997). "Rosetta Lander". CapCom. Midlands Spaceflight Society. 8 (2).
- (January 2006) "From the Rosetta Lander Philae to an Asteroid Hopper: Lander Concepts For Small Bodies Missions" in 7th International Planetary Probe Workshop. 14–18 June 2010. Barcelona, Spain...
- Meierhenrich, Uwe (2014). Comets and Their Origin. Weinheim: Wiley-VCH. ISBN 978-3-527-41281-5.
وصلات خارجية
- Rosetta mission website by the European Space Agency
- Philae entry at the National Space Science Data Center
- Philae Blog at the Max Planck Institute for Solar System Research
- Comet images – NYT, 11 November 2014.
- DLR – Video: The working of Philae, the comet lander
- ESA – Rosetta: landing on a comet
- ESA – Live Webcasts of Comet Landing & Latest Status Reports.
مهمات مركبات فضاء إلى كويكبات | ||
|---|---|---|
| ||
| المداريات |
|    |
| مداريات |
| |
| تحليق | ||
| فشلت | ||
| مزمعة | ||
| مقترحة | ||
| ملغاة | ||
| متعلقة | ||
الخط المائل يبين مهام نشطة. | ||
| مدارية | ||
|---|---|---|
| Near flyby | ||
| Far flyby | ||
| Sample return | ||
| مركبات إبرار | ||
| مركبات تأثير | ||
| مقترحة | ||
| خطط غير نشطة | ||
الخط المائل يشير للمهمات النشطة. | ||


{kind=link}
.jpg&filetimestamp=20141113180622){kind=link}
{kind=link}
{kind=link}
| موضوعات رئيسية |  | |
|---|---|---|
| الدفاع | ||
| مسابر فضاء | ||
| تتبع الأجرام القريبة | ||
| منظمات | ||
| تهديدات محتملة | ||
| السينما/الڤيديو |
| |
2014 في الفضاء | ||
|---|---|---|
| مسابر فضاء |
|    |
| أحداث ارتطام | ||
| المستعر الأعظم | ||
| مذنبات شهيرة | ||
| أجرام قريبة من الأرض | ||
| كواكب خارج المجموعة الشمسية | ||
| اكتشافات |
| |
| مواعيد فضائية عميقة |
| |
[بتصنيف:روبوت فضائي]]